

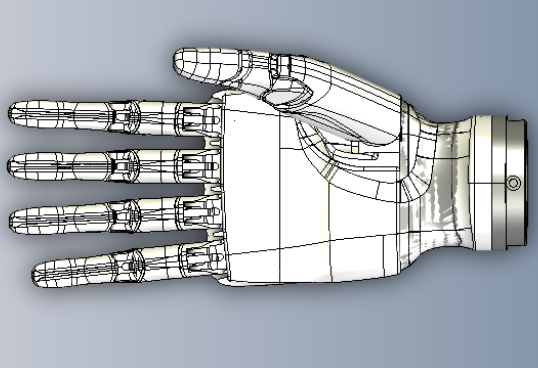
Mit der rasanten Entwicklung intelligenter Fertigung und Robotik gewinnt die geschickte Hand humanoider Roboter als Werkzeug für die Interaktion mit der Außenwelt zunehmend an Bedeutung. Die geschickte Hand ist von der komplexen Struktur und Funktion der menschlichen Hand inspiriert und ermöglicht Robotern die Ausführung vielfältiger Aufgaben wie Greifen, Manipulieren und sogar Fühlen. Mit dem kontinuierlichen Fortschritt der industriellen Automatisierung und der künstlichen Intelligenz wandeln sich geschickte Hände schrittweise von der Ausführung einzelner, sich wiederholender Aufgaben zu intelligenten Körpern, die komplexe und variable Aufgaben ausführen können. In diesem Transformationsprozess zeigt sich die Wettbewerbsfähigkeit der geschickten Hand im Inland, insbesondere bei Antriebs-, Übertragungs- und Sensorgeräten usw. Der Lokalisierungsprozess erfolgt schnell, und die Kostenvorteile sind offensichtlich.
PlanetenrollersBesatzungensind das Herzstück der „Gliedmaßen“ eines humanoiden Roboters und können in einer Vielzahl von Anwendungen eingesetzt werden, darunter in Armen, Beinen und geschickten Händen, um eine präzise lineare Bewegungssteuerung zu ermöglichen. Teslas Optimus-Torso verfügt über 14 Drehgelenke, 14 Lineargelenke und 12 Hohlschalengelenke in der Hand. Die Lineargelenke verwenden 14 umgekehrte Planetenrollengewindetriebe (2 im Ellbogen, 4 im Handgelenk und 8 im Bein), die in drei Größen kategorisiert sind: 500 N, 3.900 N und 8.000 N, um sich an die Belastungsanforderungen verschiedener Gelenke anzupassen.
Teslas Einsatz von umgekehrten Planetenrollengewindetrieben in seinem humanoiden Roboter Optimus könnte auf deren Leistungsvorteilen, insbesondere hinsichtlich Tragfähigkeit und Steifigkeit, beruhen. Es ist jedoch nicht ausgeschlossen, dass humanoide Roboter mit geringeren Anforderungen an die Tragfähigkeit kostengünstigere Kugelumlaufspindeln verwenden.
Ball sBesatzungen in verschiedenen Branchen in einem breiten Anwendungsspektrum und mit unterschiedlicher Marktnachfrage:
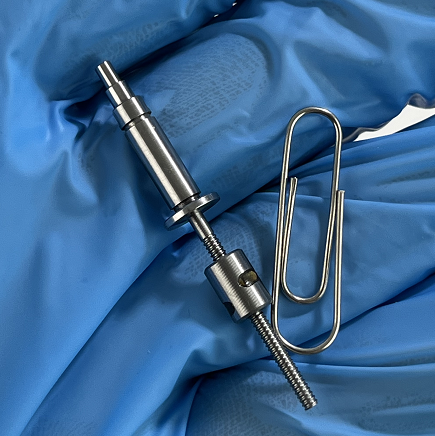
Auf der Beijing Robotics Exhibition 2024 stellte KGG Planetenrollengewindetriebe mit 4 mm Durchmesser und Kugelumlaufspindeln mit 1,5 mm Durchmesser aus; außerdem stellte KGG auch geschickte Hände mit integrierten Planetenrollengewindetrieblösungen aus.


Planetenrollenschrauben mit 4 mm Durchmesser


1.Anwendungen in Automobilen mit neuer Energie: Mit der Entwicklung der Elektrifizierung und Intelligentisierung von Automobilen, die Anwendung vonBallSchraubenim Automobilbereich hat sich vertieft, wie etwa das Edge-of-Wheel-Wire-Bremssystem (EMB), das Hinterradlenksystem (iRWS), das Steering-by-Wire-System (SBW), das Federungssystem usw. sowie Regelungs- und Steuergeräte für Automobilkomponenten.
2. Die Anwendung der Werkzeugmaschinenindustrie: Kugelumlaufspindel ist eine der Standard-Kernkomponenten von Werkzeugmaschinen, Werkzeugmaschinen enthalten Drehachsen und Linearachsen, Linearachsen bestehen aus Schrauben undFührungsschienenum eine präzise Positionierung und Bewegung des Werkstücks zu erreichen. Herkömmliche Werkzeugmaschinen verwenden hauptsächlich Trapezgewindespindeln/Gleitspindeln. CNC-Werkzeugmaschinen basieren auf herkömmlichen Werkzeugmaschinen, verfügen jedoch über zusätzliche digitale Steuerungssysteme, die die Anforderungen an die Präzision des Werkstückantriebs erhöhen und derzeit mehr Kugelumlaufspindeln verwenden. Die Spindel, der Pendelkopf, der Drehtisch und andere Funktionskomponenten werden in der Lieferkette globaler Werkzeugmaschinenfabriken aus Gründen der Anpassung oder Differenzierung tendenziell selbst hergestellt und in Eigenregie gefertigt, während rollende Funktionskomponenten grundsätzlich alle ausgelagert werden. Die Werkzeugmaschinenindustrie modernisiert die rollenden Funktionskomponenten und die Nachfrage danach wird mit Sicherheit stark wachsen.


Kugelumlaufspindeln mit 1,5 mm Durchmesser
3. Humanoide Roboteranwendungen: Humanoide Roboterantriebe werden in hydraulische und motorisierte Mechanismen der beiden Programme unterteilt. Hydraulische Mechanismen sind zwar leistungsfähiger, aber die Kosten und Wartungskosten sind höher und werden derzeit weniger eingesetzt. Die Motorlösung ist derzeit die gängige Wahl, die Planetenrollenspindel hat eine hohe Tragfähigkeit und ist die Kernkomponente desLinearantriebdes humanoiden Roboters, der zur Realisierung der präzisen Steuerung der Robotergelenke verwendet wird. Tesla im Ausland, der deutsche LOLA-Roboter an der Universität München, das inländische Polytechnikum Huahui und Kepler nutzten diesen Technologieweg.
Bei Planetenrollengewindetrieben wird der derzeitige inländische Markt für Planetenrollengewindetriebe hauptsächlich von ausländischen Herstellern besetzt. Die führenden ausländischen Hersteller Rollvis aus der Schweiz, GSA aus der Schweiz und Ewellix aus Schweden haben Marktanteile von 26 %, 26 % und 14 %.
Inländische Unternehmen und ausländische Unternehmen haben in der Kerntechnologie der Planetenrollengewindetriebe eine gewisse Lücke, holen aber hinsichtlich der Führungsgenauigkeit, der maximalen dynamischen Belastung, der maximalen statischen Belastung und anderer Leistungsaspekte allmählich auf. Der gemeinsame Marktanteil der inländischen Hersteller von Planetenrollengewindetrieben beträgt 19 %.
Veröffentlichungszeit: 28. Februar 2025




